I’ve been working on collecting BT Home Hub 5A usage by connecting with PHP + cURL and extracting data from the status page. The last piece of the puzzle is figuring out the roll-over point of the data counter; it resets when it reaches a high enough level.
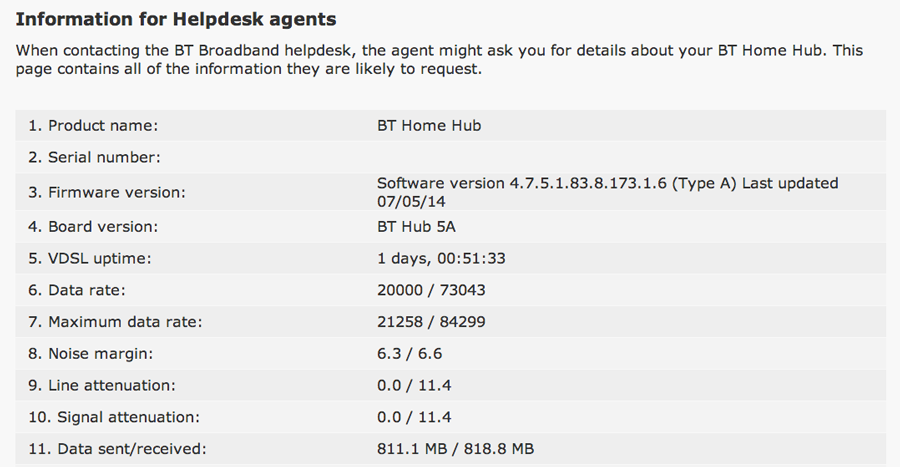
BT Home Hub 5A helpdesk screen
I collected data every second for a few hours while repeatedly downloading linux torrents (I have unlimited usage) and here are my results.
In an earlier post, I experimented with retrieving date usage and uptime stats from a BT Home Hub 5A, and cobbled together a PHP class to automatically load a privileged page. With access to the data, I need to parse it before committing the results to a persistent database. Step in regex…
I’ve had the BT Home Hub 5 for a few months now, and it keeps restarting and generally acting like a cut-price pile o’ shite. So, in an effort to monitor its shitey-ness, I figured that my home server could extract the uptime and the traffic usage every x minutes.
A BT Home Hub 5A in its natural environment, with what looks like pubic hair in the carpet
The HH5 is – on paper – a great little router especially as it has an Infinity modem built in meaning you can do away with the separate OpenReach white box. You can’t mount it on the wall which is annoying, and the feet are fairly useless at keeping it from toppling over, but it does output both 2.4 and 5Ghz wireless networks. One of its big downside, at least for myself, is the lack of any way of scripted monitoring (e.g. SNMP).